Calibración de cámara usando una red neuronal
Para los que os hayáis metido en el farragoso mundo de la calibración de cámara, quizá me podáis ayudar. Sorry que lo dejo en inglés pero me da pereza traducir:
In order to practice with NN I have thought of doing a camera calibration exercise, to find out if a simple NN can perform similarly or even better than classical ICC profiles based on LUT's. I have no much idea about how ICC profiles and calibration in general work so here are some questions:
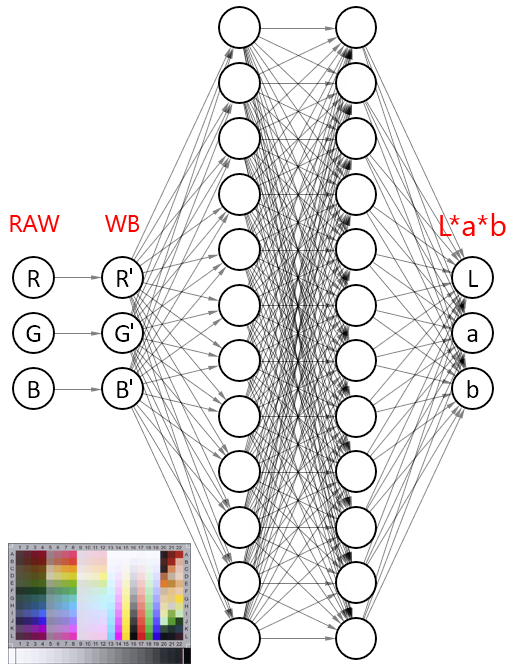
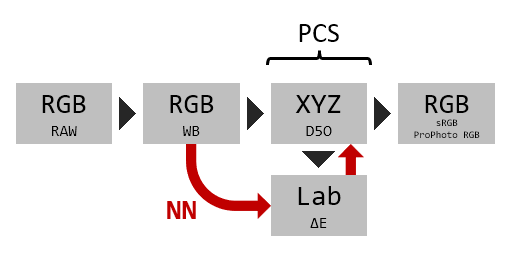
This is the structure of the NN I plan to implement. Will try different number of nodes since overfitting could lead to very precise colour reproduction for the patches but undesired behaviour for colours unseen by the NN. From a ML point of view, we should preserve some patches in the card as validation set, but on the other hand even an IT8 has very few samples to properly train a NN so I'm not sure what's the best approach here to prevent overfitting.
Regards
In order to practice with NN I have thought of doing a camera calibration exercise, to find out if a simple NN can perform similarly or even better than classical ICC profiles based on LUT's. I have no much idea about how ICC profiles and calibration in general work so here are some questions:
- In a regular calibrated pipeline, I guess white balance is applied BEFORE the ICC profiling conversions take place. Is that correct?
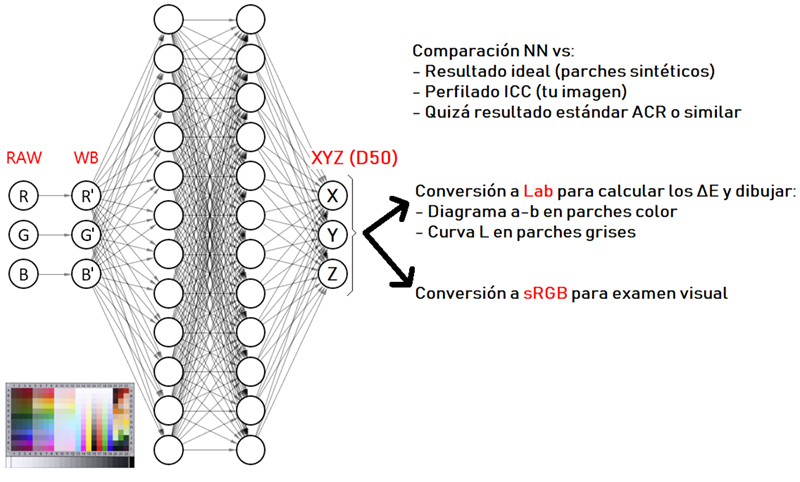
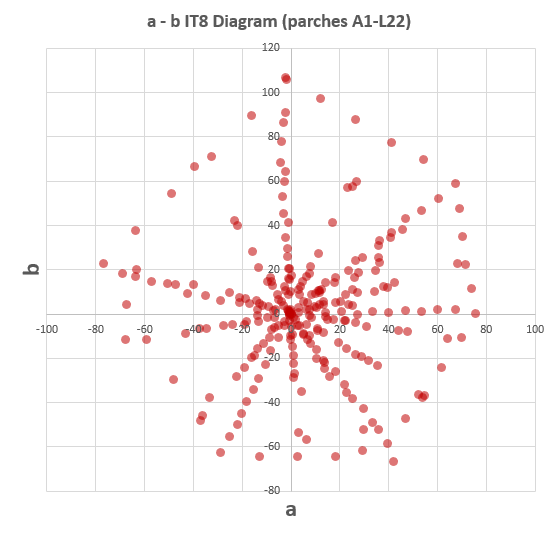
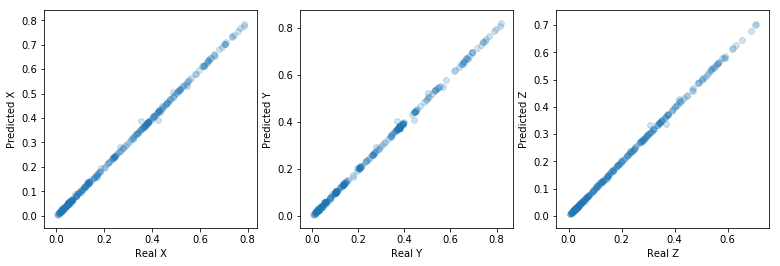
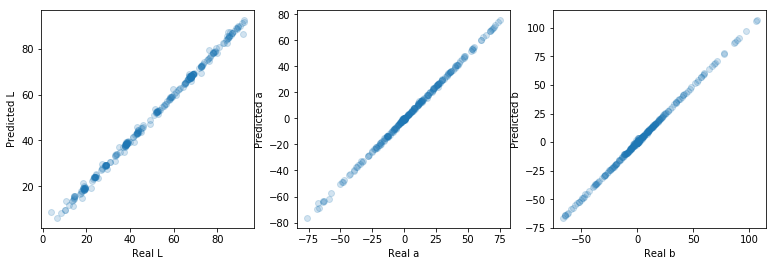
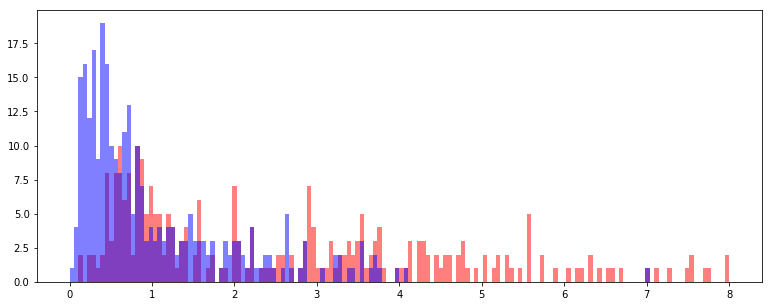
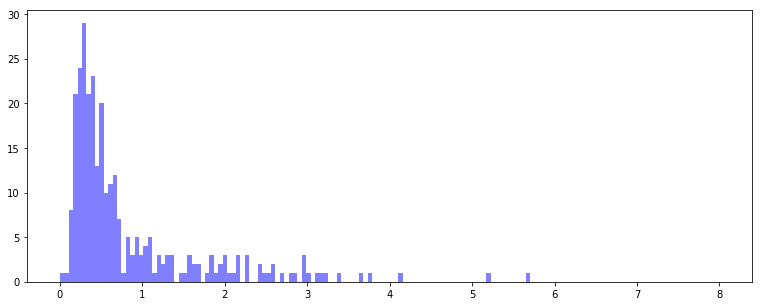
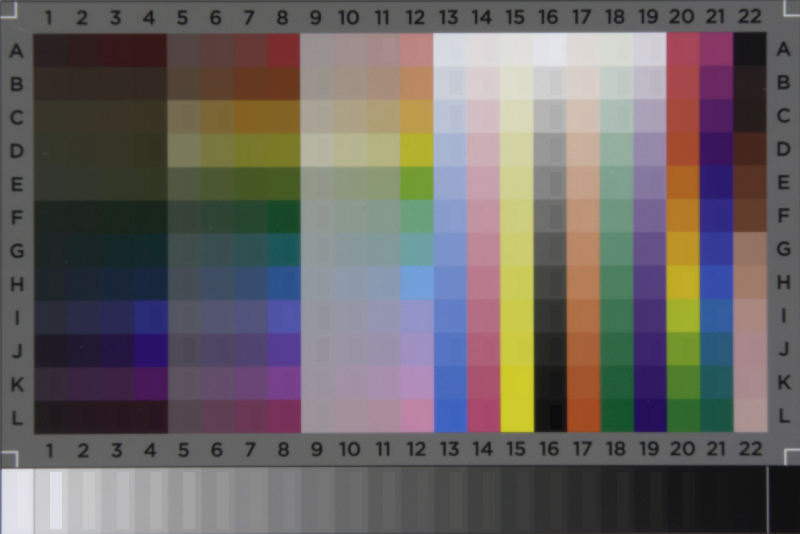
- To measure the performance of a calibration workflow, a standard procedure is to measure L*a*b deviations (deltaE) over different patches using some colour card, correct?
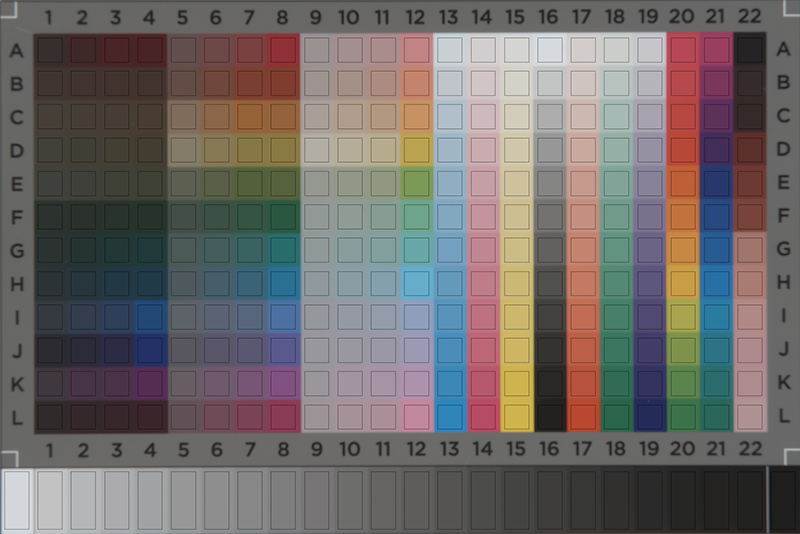
- Let's assume we use an IT8 card for being the card with more patches (that is good in order to train the NN): the L*a*b values with which we need to compare our calibrated output are standard (synthetic) expected values or are Lab values measured (spectrophotometer) over the specific IT8 card used?
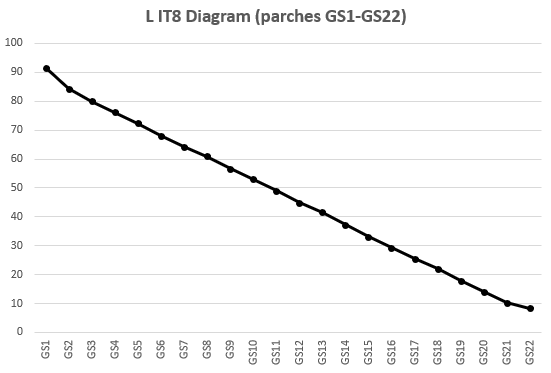
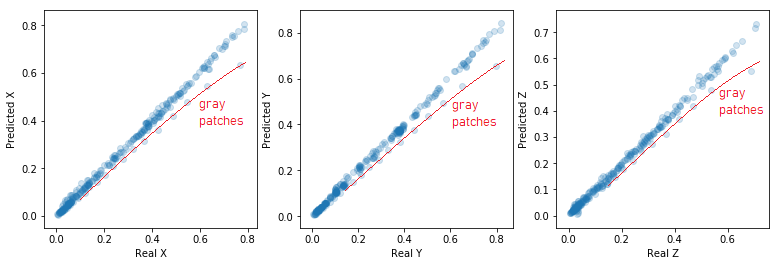
- To do proper WB before training the network, I guess we just need to use the gray patches on the card, correct? later on the white balanced RAW RGB values will be used to train the network.
This is the structure of the NN I plan to implement. Will try different number of nodes since overfitting could lead to very precise colour reproduction for the patches but undesired behaviour for colours unseen by the NN. From a ML point of view, we should preserve some patches in the card as validation set, but on the other hand even an IT8 has very few samples to properly train a NN so I'm not sure what's the best approach here to prevent overfitting.
Regards
_tanh_identity_comp800.jpg)