Hablado con Hugo, resulta que en la tabla que me pasó un parche gris estaba duplicado y por eso todos se corrieron una posición dando lugar al desaguisado. Me ha pasado los valores correctos y de paso he probado con una nueva función de activación (tangente hiperbólica) que funciona mejor que las otras dos probadas (relu y sigmoide). El resultado para los parches de entrenamiento es excelente:
MLP_XYZ_()_tanh_identity : ΔE_max = 33.6562 , ΔE_mean = 3.2097 , ΔE_median = 1.8020
MLP_Lab_()_tanh_identity : ΔE_max = 82.1350 , ΔE_mean = 28.3336 , ΔE_median = 21.5002
MLP_XYZ_()_logistic_identity : ΔE_max = 33.6562 , ΔE_mean = 3.2097 , ΔE_median = 1.8020
MLP_Lab_()_logistic_identity : ΔE_max = 82.1906 , ΔE_mean = 28.3471 , ΔE_median = 21.4991
MLP_XYZ_(3, 3)_tanh_identity : ΔE_max = 15.3840 , ΔE_mean = 2.4645 , ΔE_median = 1.8418
MLP_Lab_(3, 3)_tanh_identity : ΔE_max = 43.0895 , ΔE_mean = 11.6182 , ΔE_median = 9.2091
MLP_XYZ_(3, 3)_logistic_identity : ΔE_max = 18.1560 , ΔE_mean = 3.8059 , ΔE_median = 2.2673
MLP_Lab_(3, 3)_logistic_identity : ΔE_max = 77.2547 , ΔE_mean = 25.7759 , ΔE_median = 20.7278
MLP_XYZ_(4, 4)_tanh_identity : ΔE_max = 11.2728 , ΔE_mean = 2.0082 , ΔE_median = 1.5386
MLP_Lab_(4, 4)_tanh_identity : ΔE_max = 37.5632 , ΔE_mean = 8.2402 , ΔE_median = 6.7438
MLP_XYZ_(4, 4)_logistic_identity : ΔE_max = 16.7437 , ΔE_mean = 2.3609 , ΔE_median = 1.6683
MLP_Lab_(4, 4)_logistic_identity : ΔE_max = 68.0552 , ΔE_mean = 17.6988 , ΔE_median = 12.4104
MLP_XYZ_(16, 16)_tanh_identity : ΔE_max = 13.7044 , ΔE_mean = 2.0632 , ΔE_median = 1.2234
MLP_Lab_(16, 16)_tanh_identity : ΔE_max = 3.9206 , ΔE_mean = 1.0084 , ΔE_median = 0.8693
MLP_XYZ_(16, 16)_logistic_identity : ΔE_max = 13.1919 , ΔE_mean = 1.9344 , ΔE_median = 1.2701
MLP_Lab_(16, 16)_logistic_identity : ΔE_max = 6.1042 , ΔE_mean = 1.3190 , ΔE_median = 1.0214
MLP_XYZ_(50, 50)_tanh_identity : ΔE_max = 14.7397 , ΔE_mean = 2.4049 , ΔE_median = 1.6943
MLP_Lab_(50, 50)_tanh_identity : ΔE_max = 3.9451 , ΔE_mean = 0.6966 , ΔE_median = 0.5313MLP_XYZ_(50, 50)_logistic_identity : ΔE_max = 26.3273 , ΔE_mean = 3.5872 , ΔE_median = 2.1889
MLP_Lab_(50, 50)_logistic_identity : ΔE_max = 4.0815 , ΔE_mean = 0.7272 , ΔE_median = 0.5018
MLP_XYZ_(100, 100)_tanh_identity : ΔE_max = 9.9610 , ΔE_mean = 1.5248 , ΔE_median = 1.0915
MLP_Lab_(100, 100)_tanh_identity : ΔE_max = 3.3160 , ΔE_mean = 0.5003 , ΔE_median = 0.3757
MLP_XYZ_(100, 100)_logistic_identity : ΔE_max = 29.8789 , ΔE_mean = 3.7231 , ΔE_median = 2.1818
MLP_Lab_(100, 100)_logistic_identity : ΔE_max = 3.7744 , ΔE_mean = 0.6649 , ΔE_median = 0.4671
MLP_XYZ_(200, 200)_tanh_identity : ΔE_max = 8.4625 , ΔE_mean = 1.4752 , ΔE_median = 0.9700
MLP_Lab_(200, 200)_tanh_identity : ΔE_max = 3.3737 , ΔE_mean = 0.4059 , ΔE_median = 0.2591
MLP_XYZ_(200, 200)_logistic_identity : ΔE_max = 16.8308 , ΔE_mean = 1.8797 , ΔE_median = 1.1590
MLP_Lab_(200, 200)_logistic_identity : ΔE_max = 4.2315 , ΔE_mean = 0.6553 , ΔE_median = 0.4166
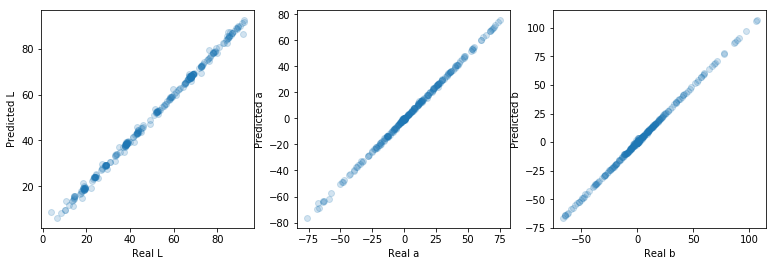
El delta E medio para el modelo
MLP_Lab_(50, 50)_tanh_identity está por debajo de 1, lo que en palabras de Hugo Rodríguez "nunca he visto una desviación tan baja en un ICC". El error máximo también está muy contenido, por debajo de 4.
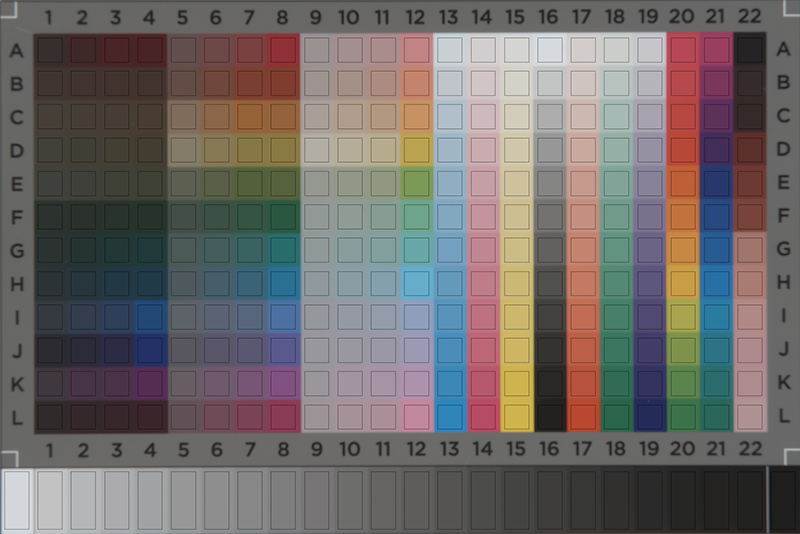
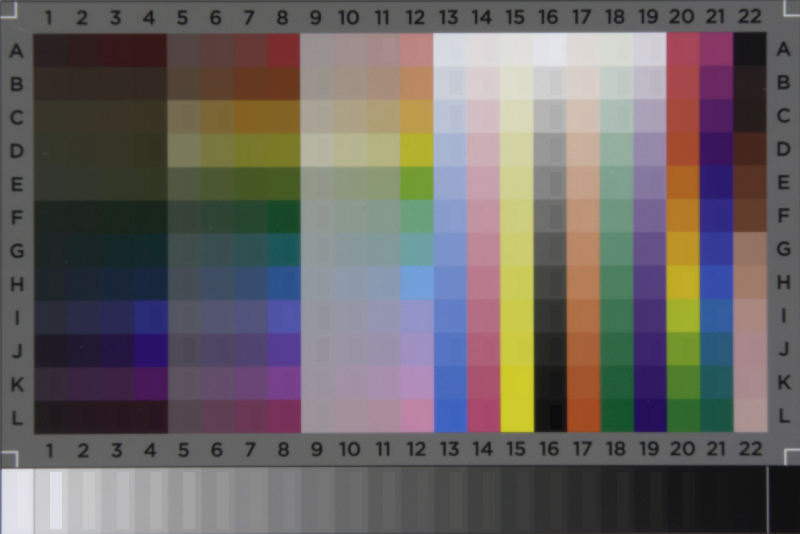
_tanh_identity_comp800.jpg)
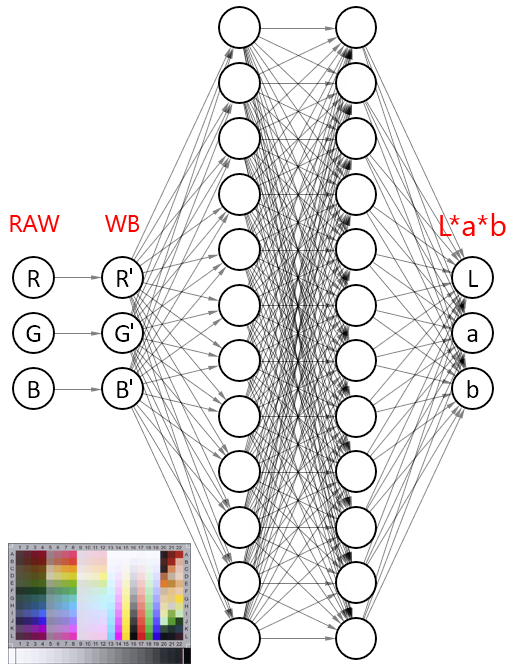
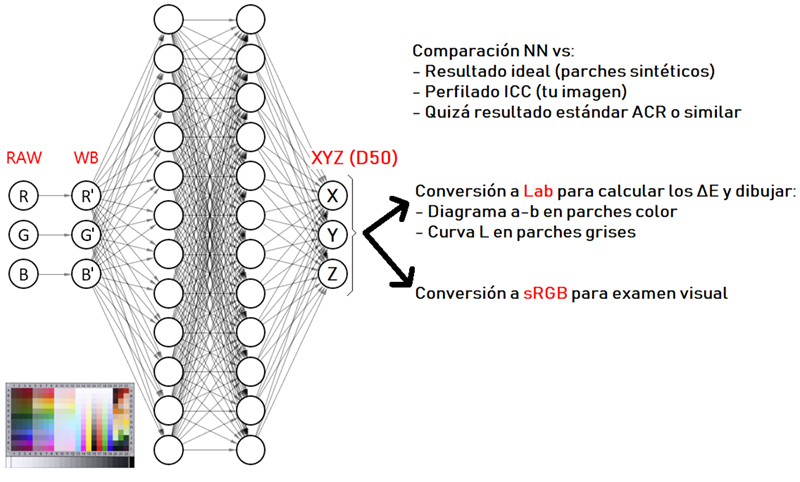
En la anterior imagen, la mitad izquierda es la predicción (=perfilado) hecha por la red neuronal, y la mitad derecha el color teórico exacto. En la mayoría de parches no se distinguen, lo cual es bueno lógicamente.
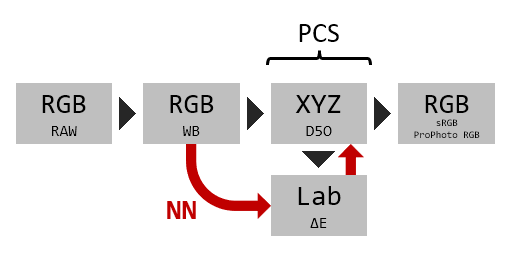
Ahora queda validar el perfilado con colores que no estén en la carta. Si las interpolaciones entre colores no vistos por la red neuronal no son suaves, esta calibración no sirve de nada aunque funcione bien en los parches de la IT8.
Fingers crossed.
Salu2!